Figure 1. Flexible gas sensors(J.Mater.Chem., 2012, 22, 21824-21827;Back Cover), artificial electronic skins(Advanced Materials, 2014, 26, 1336-1342; Cover), flexible non-contact sensing devices(Advanced Materials, DOI: 10.1002/adma.201404069; Inside Cover).
Reduced graphene oxide (r-GO), a new material derived from chemically modified graphene, is believed to be a promising candidate for flexible electronics due to its tunable bandgap and large surface area with special 2D structures because of the atomic thickness. Up to now, it is still crucial to find a convenient way to assemble r-GO ultrathin films with controllable thick-ness and high quality.
Most currently, Professor Zhang Ting's group proposed an effective and reproducible way to assemble r-GO ultrathin films with controllable thicknesses. The obtained r-GO ultrathin films possess high transparency (>82% at 550 nm), tunable sheet resistance, uniform electric conductivity, and structural homogeneity in wafer scale. Also, the thicknesses of r-GO ultrathin films in the range of 89-148 nm were controlled by using solvents with different surface tension. These ultrathin films could be transferred to any target substrate for further applications. Moreover, they demonstrated the flexible matrix panel (including 10×10 pixels) based on r-GO ultrathin films for noncontact humidity sensing, which is capable of close proximity sensing without touching it, with the performance of high spatial resolution, high sensitivity, low operation voltage, and short response time. This device provides a distinct approach for human-machine interaction, complementary to the traditional touch panel in applications that require contact mode. These results published in Advanced Materials, DOI: 10.1002/adma.201404069, also highlighted as the inside back cover.
This work supported by the funding from the National Natural Science Foundation of China and the Chinese Academy of Sciences, and the technique support from Printable Electronics Research Center, Platform for Characterization & Test, and Nano-Fabrication Facility of SINANO. CAS.
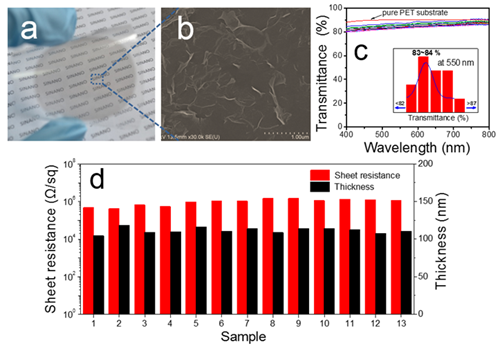
Figure 2. a) A typical photograph and b) SEM image of a r-GO ultrathin fi lm on a PET substrate. c) Transmittance spectra of 13 r-GO ultrathin filmson PET substrates, which were exfoliated from the same original relative dense r-GO fi lm for 13 times. d) Sheet resistances (red, on the left) and thicknesses(black, on the right) of 13 r-GO ultrathin films.
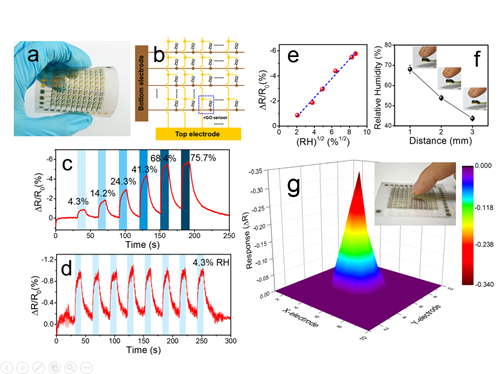
Figure 3. a) Photograph of flexible matrix device under bending. b) Circuit schematic of the matrix device to realize noncontact sensing of individualpixels by row and column signals. c) Real-time response of one sensor in the flexible matrix device to RH from 4.3% to 75.7%. d) Real-time-repeatedresponse of the sensor at 4.3% RH for eight cycles. e) Sensitivity (Δ R / R0) of the flexible device versus the square root of different RH. f) Calibration ofRH of fingertip with different distance by an RH reference sensor (Sensirion EX-H4). g) The 3D mapping of matrix device when the fingertip approachesthe relative center area of the device. Inset is the photograph of this process.