Electrochemical actuators, which are the branches of artificial muscles have great potential applications in bionic robots, smart sensor, MEMS, bio-medicine and aerospace due to their lightweight, flexibility, low driving voltage and large deformation. Their typical structure is composed of a layer of ion-conductive electrolyte sandwiched between electrodes, which can bend back and forth due to the electrode expansion induced by excess ion accumulation under applied voltage. Based on the latest research, carbon nanotubes and graphene with large specific surface areas, porous networks and high electrical conductivity, which are all benefits for the ions accumulation present high actuation performance. However, low electrochemical activity of carbon nanotubes and graphene severely discourage their further improvement of the actuation response and strain levels.
Recently, a research group led by Professor Wei Chen at Suzhou Institute of Nano-tech and Nano-bionics,Chinese Academy of Sciences (SINANO), has designed a novel electrochemical actuator based on a graphitic carbon nitride nanosheet electrode to improve the electrochemical activity of carbon materials.This work was published in Nature Communications. 6, 7258 (2015).
In order to improve the electrochemical activity of carbon materials, nitrogen doping that could modify the local electronic structure to increase the surface charge density and the interaction with ions was introduced. As shown in the Figure 1, graphic carbon nitride electrode is fabricated by the calcination of a mixture of glucose and carbon nitride precursor (g-C3N4), and the manageable nitrogen doping contents (7.02-16.7%) are obtained. By controlling the reaction temperature, when the doping content of pyridinic N reaches 6.78% (see Figure 2), high electrical conductivity (382 Sm-1), high electrochemical activity (259.4 Fg-1 which was 7 times higher than graphene) and narrow pore size distribution (~2nm) are obtained. The research shows the actuation mechanism is the migration, absorption and accumulation of ion in the pore structure of carbon nitride electrodes under electric field (see Figure 3). It is due to the electrode’s specific micropore size, distribution, and strong interaction with the ionic liquid, performing excellent electrochemical strain by the ions intercalation and de-intercalation of electrodes, including large electromechanical strain (0.93% under 3V), fast response (13.8 %s-1 under 20Hz) and high actuation stability (100,000 cycles). These excellent actuation performance show orders-of-magnitude improvements compared to previous reported ionic actuators.
Based on these remarkable achievements, we successfully realize the multiple degrees of freedom motion in the form of bionic design such as flapping flight, linear motion and snake crawling movement (see Figure 4). We believe that our results can lead to the design of new hetero-atom modulating electrodes to offer unprecedented access to next-generation electromechanical devices.
This work was supported by the National Natural Science Foundation of China, the Natural Science Foundation for Distinguished Young Scientists of Jiangsu Province, the Hong Kong, Macao and Taiwan Science and Technology Cooperation Program of China and the External Cooperation Program of BIC, Chinese Academy of Sciences.
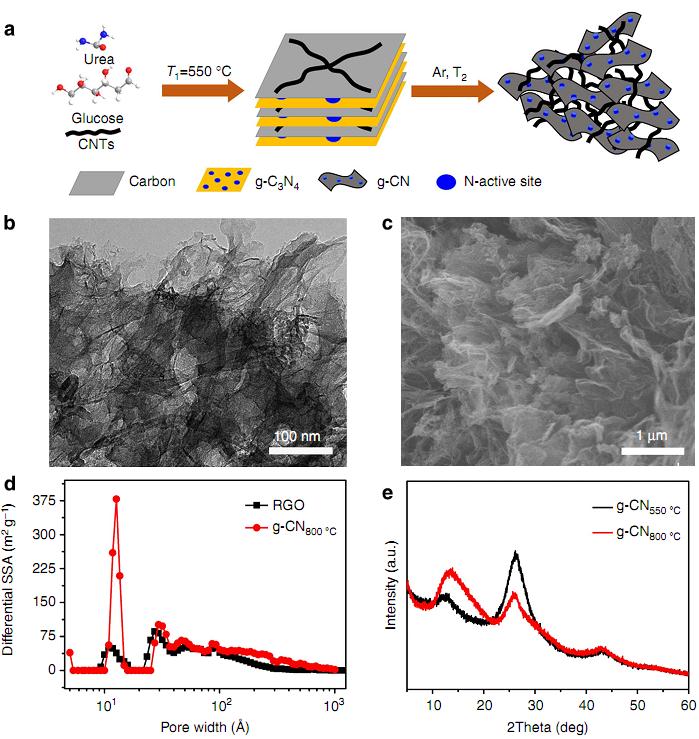
Figure 1. Fabrication and structural characteristics of the graphic carbon nitride electrode.(Image by Prof.CHEN Wei’s group)
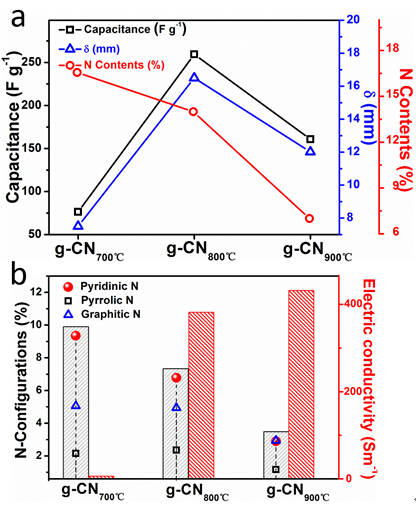
Figure 2. Electrical conductivity, electrochemical, electromechanical behaviors of actuators.(Image by Prof.CHEN Wei’s group)
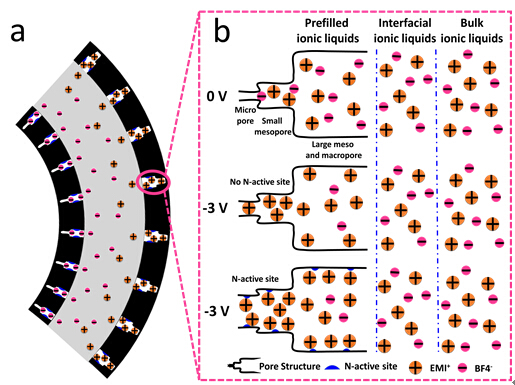
Figure 3. Schematic illustration of the actuation mechanism.(Image by Prof.CHEN Wei’s group)
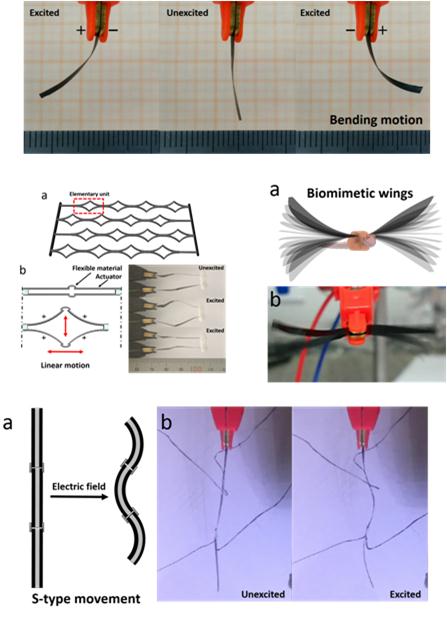
Figure 4. Multiple degrees of freedom motion of actuators.(Image by Prof.CHEN Wei’s group)






